
The first chapter in this series, Clifford Algebra: A Visual Introduction, presented a brief history of the incremental discovery of algebra, culminating in the discovery of Clifford Algebra, the algebra that subsumes them all, because Clifford Algebra is not just another algebra, it is the radical discovery that all of algebra is ultimately based in geometry.
In this chapter we move on to a projective geometry obtained by adding one extra dimension, and viewing the Euclidean world from that standoff perspective. If done correctly, this technique provides some extraordinary invariances to our representation, in particular by providing an elegant means to deal with the problem of “infinities”, or how to represent an infinite world within a finite representation.
A final chapter will cover the Conformal Geometry, the most spectacular addition to Clifford Algebra.
The problem of infinities can be seen when considering the number line, or the x axis. You can never depict this number line explicitly on the page the way you can depict a line segment of any length by scaling it to the page. It is the ends of the line, where it touches infinity in opposite directions, that pose the problem, because it is impossible to reduce the scale enough to depict all the way to infinity. Projective geometry offers a means to plot all the way to infinity on a finite page, and it does so using the same principle by which the lens in a camera, or in your eye, converges light to a focus to project a perspective image of the scene on a photosensitive surface.
Projective Geometry 2-D to 3-D

The idea behind projective geometry is to add an extra dimension to reality and to view the world from the perspective of that supernumerary dimension. We begin by demonstrating the principle first in two dimensions. Consider a two-dimensional Euclidean space, or E2. We add a unit vector in a third dimension, and view the Euclidean plane from the perspective of that point. For example each integer value on the x axis becomes an angle viewed from that viewpoint, as traced in blue lines below. But angles don’t make much of an image, so we project each of those angles as a point on an image plane placed somewhere in the path of the sightline rays.


This produces a perspective projection of the two-dimensional plane that records x values in one direction all the way out to infinity, with the property that the closer you get to “infinity” (the pseudo-infinity point in the projection) the more compressed the scale becomes. If you complete the plot for all points in x and y, that produces a perspective view of the Euclidean plane with a horizon line at “infinity” and vanishing points in the directions of the x and y axes.

The same principle works just as well in three dimensions, producing full 2-D perspective views of a 3-D scene. This principle makes perfect sense in perception, where an essentially infinite world projects an image onto a 2-D sensory surface. This principle is commonly used in computer graphics to generate synthetic scenes by performing a perspective projection that is equivalent to the projection in a camera.



The computational transformation from a three-dimensional scene to its two-dimensional projection can be performed by a simple matrix multiplication of each (x,y,z) point in the model of the scene by the transformational matrix, to produce its two-dimensional projection on the image plane. The matrix encodes the entire projection including any translation, rotations, scaling, and shearing transformations that may be included in the projection. This matrix is often called “homogeneous” coordinates because it treat translation, rotation, scaling, and shearing transformations all the same way, by setting the appropriate coefficients in the matrix and performing the matrix multiplication on each point in the model. For example the coefficients along the main diagonal of the matrix, sx, sy, sz, determine the scaling of the (x,y,z) point in the projection, while the three values in the right column, dx, dy, dz, determine the translational displacement in three dimensions, etc. In Geometric Algebra the equivalent computation is performed using a three-dimensional spatial structure representing translations, rotations, and scaling in a spatially meaningful order, including rotations, defining a transformational “structure” that resembles the transformations that it models.


We can draw an analogy between the principle of projection and a laser beam mounted on gimbals that behaves like a Clifford vector located at the origin, that can point in any direction. If the laser beam is projected onto a screen, the linear beam is transformed into a point projected on the screen. Unlike the laser beam itself, the point is no longer confined to the origin, but can now be projected anywhere on the screen. If we consider the projection itself, we see that the projection has transformed the basic elements of Clifford Algebra from linear vectors to punctate points. In projective geometry points are the most elemental feature.

Here we show (from Perwass & Hildenbrand 2004) Euclidean vector a in two-dimensional Euclidean space E2 transformed into vector A by the projective transformation A = P(a) where P(a) is obtained by simply adding vectors a + e3. This is not just a vertical translation of a to A, but vector A is viewed from the origin as an angled vector, essentially transforming a displacement from the origin to an angle viewed from the origin.
This transformation is profound because it draws on the equivalence between translational dimensions and corresponding rotational ones. Translation of a in directions e1 and e2 is transformed to rotations of A in the rotational directions parallel to e1 and e2. Furthermore, the “x axis” no longer extends to infinity in opposite directions, the projective vector A is now bounded at +/- 90 degrees which now literally express +/- “infinity” (in “scare quotes” to indicate merely a “pseudo-infinity”).
The projected origin P(0,0) is no longer a special point with the polarity reversals characteristic of Clifford vectors, the projected origin is now just another point in projective space. While the scalar product of a vector with the origin in Euclidean space is always identically zero, this is not necessarily the case in projective space.
Actually the projective transformation is exactly what occurs as an analog computation in the eye, as light rays from a practically infinite world are projected through a focal point onto the spherical surface of the retina, where each point on the retina represents a visual angle to the world. The Euclidean space in the projective model, the one that extends to infinity in all directions, should therefore not be thought of as part of the representation in the brain, that part of the projective model represents the world outside the brain, which actually does extend virtually to infinity in all directions. It is only the projection itself, P(x,y) or P(x,y,z) that represents a model in the brain, and in fact projection demonstrates how a finite representational medium, whether the surface of the retina or a volume in the visual cortex, can express a virtually infinite external world by depicting that world in projection.
Interactions Between Projective Vectors
Projected vectors in Geometric Algebra interact by the same sums and products as in Clifford Algebra although they seem qualitatively different in projection.

If the laser beam “paints out” a pair of points, independently or successively alternating between them, this is equivalent to “adding” two points, presenting them “simultaneously”, although each remains independent of the other.


If we allow the laser beam to modulate between the two beams, it creates a blend of the two points represented by a bivector surface between the two vectors, as by the wedge product between two vectors, and the projection of that bivector on the screen is the line joining the two points. The basic elements of projective geometry are points, and the wedge product between two points is the line segment that joins them. Like the points themselves, the bivector line segment can be presented at any location on the screen.

Here we show(from Perwass & Hildenbrand 2004) a bivector A^B spanning projective vectors A and B, the projection of the bivector representing a line in projective space. The Outer Product Nullspace (OPNS) of the bivector A^B (i.e. NO(A^B) ) is the whole plane within which the bivector is embedded, and the projection of that plane on the projection plane represents the infinite line of which the line segment is a part. The Clifford Algebra concepts of the IPNS and OPNS are just as useful in projective space.

The wedge product between three vectors is a triangular cross-section beam, that projects to the triangular surface that joins the three projected points on the screen. Four or more vectors all projected onto the plane would fill in the polygonal area spanned by the points.


The bivector between two points is anti-commutative, i.e. A^B is different than B^A, so too is the trivector A^B^C different than trivector A^C^B, for example, as shown above. There is a directedness, or sequence between the trivector products that is preserved in the wedge product, where A^B^C takes the bivector A^B and sweeps it towards C, whereas A^C^B starts with bivector A^C and sweeps it toward B.
Projective Geometry 3-D through 4-D and back to 3-D
In the examples above for simplicity in visualization we have been dealing with projective geometry of a 2-D Euclidean space to a 3-D projective space and back to a 2-D projection. In perception the projection is from the 3-D geometry of external space viewed from a fourth-dimensional perspective, projected back into a 3-D projective model of external space. While it is difficult to visualize a fourth spatial dimension and the projection process taking place within it, it is relatively easy to visualize the effect of that projection back in the 3-D projection. We will therefore ignore the details of the projection mechanism itself and study the properties of the projection back in the three dimensional world of our experience.

The outer “room” in this figure represents a real room in external space, a space which is practically infinite in extent. The inner room is a three-dimensional projection of that outer room, “painted out” by a metaphorical laser beam that maps 3-D points from the external world to 3-D points in the projective model.

This model world may look like a three-dimensional rectangular room, but it is supposed to represent a model that is distorted by perspective like an Ames Room, with objects in the distance presented at smaller scale than objects in the foreground. In this model, “infinity” is no longer an infinite distance away, it is right there, where the perspective lines meet. The purpose of this projection is to project from an external world that is practically infinite in extent, into a model world of a finite size, small enough to fit in a human head. As with our earlier laser analogy, we can picture laser beams representing vectors projecting to points in three-dimensional space. Two points presented independently or successively represents the sum of those points in space.

The wedge product between two 3-D points defines the three-dimensional line segment that joins them.


The wedge product between three or four points in the same plane defines a triangular, or rectangular plane in space.

If we add another point outside of the plane, the wedge product between all those points defines the three-dimensional volume spanned by those points.

And if one of those points is at “infinity”, this now defines a rectangular cross-section beam that stretches all the way to “infinity” in our representation, which is only possible because “infinity” is not an infinite distance away, it is right there, where all the perspective lines meet.
The three-dimensional projective geometry through a fourth-dimensional projection provides an extraordinarily useful means to produce an explicit spatial model of an essentially infinite external world, all within a finite spatial representation that can represent points at “infinity”. This is highly suggestive of the properties of our own world of perceptual experience.

The operation of projection is very fundamental to Geometric Algebra. So much so that is is trivially easy to define a pinhole camera in Geometric Algebra. We begin with four points to define the image plane, whose surface is defined by the wedge product between them, i.e. a1^a2^a3^a4.
Next we define a focal point F on one side of the image plane. Now for any point P on the other side of the image plane, the line joining F and P is defined simply as F^P. The intersection between that line and the image plane can be computed simply as
(a1^a2^a3^a4).(F^P)
and thats it! The pinhole camera is complete! If we employ a parallel algorithm that processes every point in the scene simultaneously, we get a fully functional pinhole camera that projects an image on the screen of the world seen through the screen.

It is a fundamental property of parallel optical or wave-based systems that any computational transformation can be reversed by simply reversing the path of each ray of light in the system, which inverts the functionality, as seen when looking through the wrong end of a telescope which makes it minify instead of magnify the image. The same system that performs a pin-hole camera projection to an image, can also perform an inverse projection of the two-dimensional image back out into the three-dimensional model world, thus performing an “inverse optics” reverse projection. Now the inverse optics problem is under-constrained, because there is an infinite range of possible inverse projections that can all correspond to a given projected image, and thus additional information must be added to resolve fundamental ambiguities. Nevertheless, the ease with which Geometric Algebra performs spatial projections, whether forward or inverse, makes possible the kind of reification by inverse-optics projection as suggested in Lehar’s (2003) Bubble World model of perceptual reification to explain how the two-dimensional retinal image is reverse-projected to form a full three-dimensional perceptual rendition of the three-dimensional stimulus most likely to have been the original cause of the given two-dimensional projection.
Limitation
The perspective projection provides a wonderful means for projecting an infinite external world into a finite projection. But there is a fundamental flaw in this concept, it cannot represent opposite ends of the room simultaneously.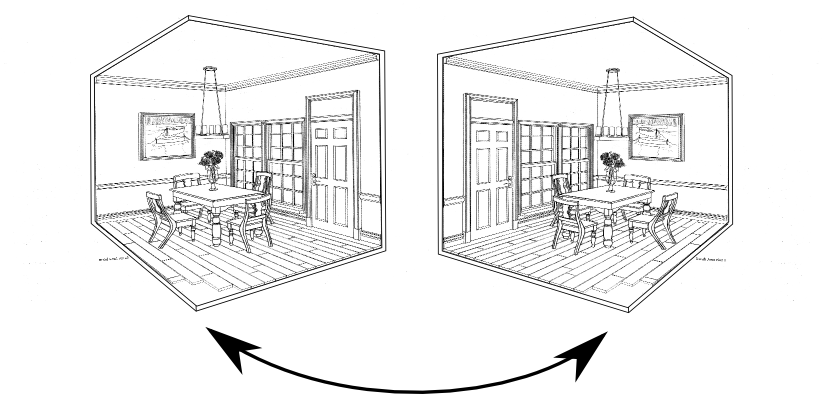
Projective perspectives taken from opposite directions are incommensurable — they cannot be merged seamlessly without a sharp discontinuity where they join.

The problem can be traced back to the concept of projection onto a plane, which can only depict one half of reality in principle.
A solution to this limitation will be presented in the next chapter of my presentation on the principles of Geometric Algebra in the Conformal Projection Model of Geometric Algebra proposed by David Hestenes.

Pingback: Geometric Algebra: Conformal Geometry | slehar
Pingback: Clifford Algebra: A visual introduction | slehar
Pingback: 5-MeO-DMT Awakenings: From Naïve Realism to Symmetrical Enlightenment | Qualia Computing